from the beginning, doing a set disabled sequence which runs for 0.002 seconds seems like the safest bet. Does it seem realistic? The ball would spawn as though it was new right?
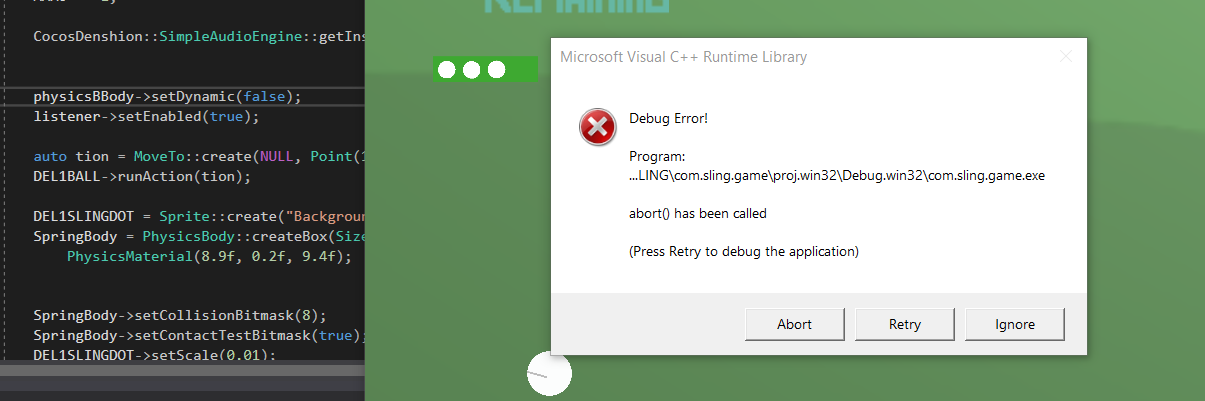
I will just use this. The problem is, when I set a dynamic action in the method. I get:
I need to initiate a sudden stop. I sadly do not see an example of this. All achieved in 15 is good and I’ve achieved it already. It’s why the ball doesn’t collide with slingdot. Did you see the video? Is my issue unclear?
heh sorry for any confusion. In the example code, to make it easier I renamed the physicsBBody as physicsbody . PhysicsBBody is short for physicsballbody and has always been it’s name in the actual code proof? Take a look at the joint code in my last big code post
otherwise I think the most likely way to fix it is to make a sequence in which:
1.set variables for a set dynamic true action and a set dynamic false action
2.run them in a sequence
3.->runaction the sequence to the ball sprite
step 1 and 2 i need help with, however. How do you set those as variables? In an auto code. I’ve never done this before and my numerous attempts haven’t worked
@dimon4eg can I tag you in. Do you understand this? What I think the problem is and what is being described seem different though. Can you help understand?

 proof? Take a look at the joint code in my last big code post
proof? Take a look at the joint code in my last big code post 